車輪移動系
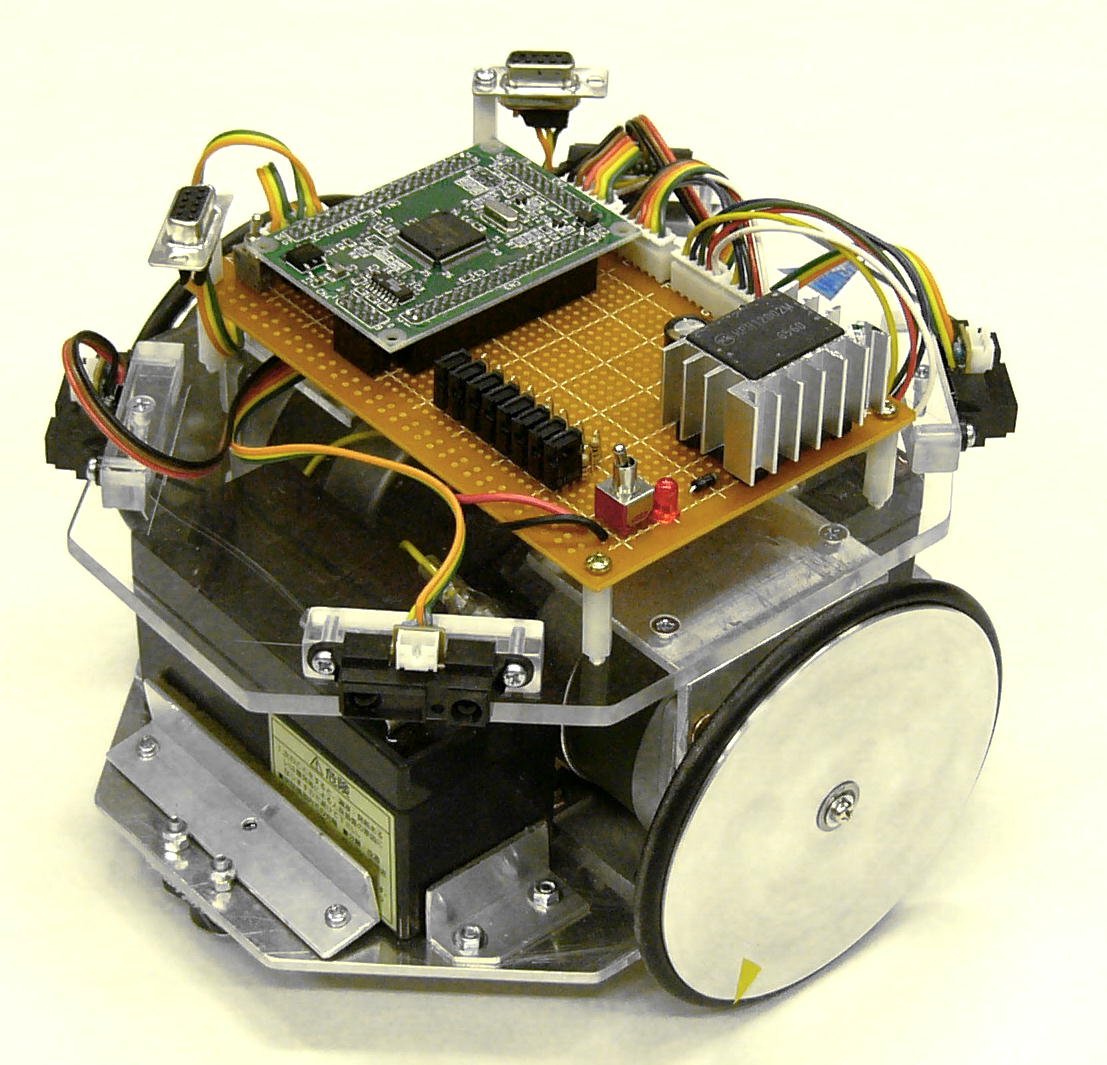 |
車輪移動ロボット1号機: 研究室開設1年目に「車輪移動ロボットを手始めに」と作れ具合も確認すべく、まずはつくってみた自律自立型 車輪移動ロボット。 ステッピングモータによる駆動、マイコンH8/3052による制御、PSDセンサによる距離認識などを盛り込んだロボット。 このあと、H8+ステッピング系のロボット(熊研およびロボ研)の基礎実験機となる。 (2003年度, 窪田) |
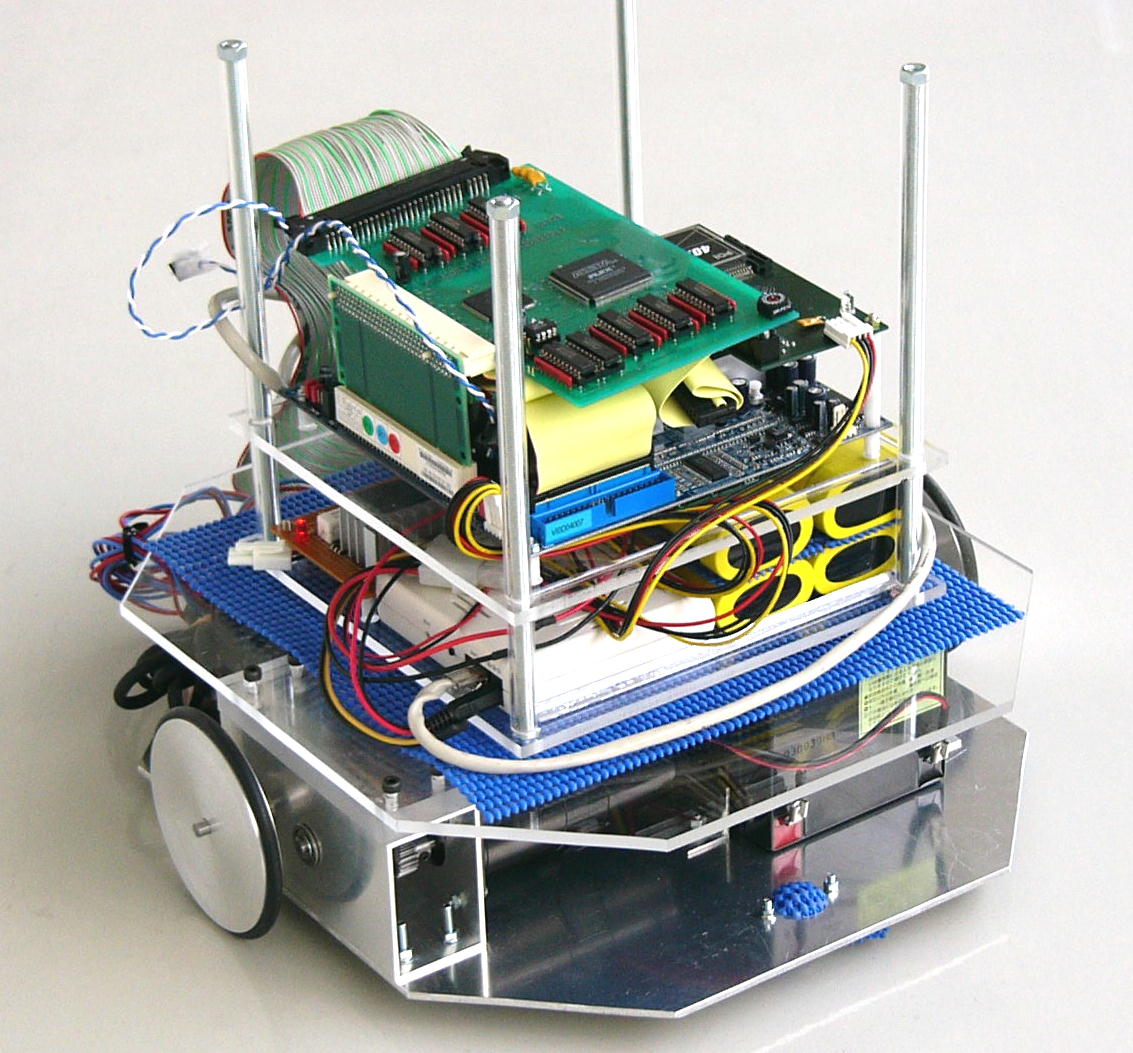 |
車輪移動ロボット2号機(通称 いまづロボ): 2年目開発の本格派?車輪移動ロボット。いろいろと機材もそろい、環境も整ったため、各種実験汎用機を目指して開発。 駆動系:DCサーボモータ 40W×2、鉛蓄電池12V×2 制御系:ワンボードPC EPIA TC10000、メモリ512M、CF-1G、OS Linux(RedHat9→Knoppix Edu TG4)、UniversalIF、7.2V NiCd×4 特徴は、制御をパソコン互換のワンボードコンピュータとLinuxによったこと。これにより開発時は、無線LANでログイン、もしくはキーボード、ディスプレイを直結して直接、といった、制御環境=開発環境を構築。 また、あまり難しいことを考えず設計したところ、定格速度が3000mm/sと、ちょっとマジに走らないと逃げられない速度に。現在のところ、怖くて2500mm/sまでしか出していない。 難点は、外界センサが全くついていないため、障害物にかまわずつっこむところ。 (2004年度, 今津) |
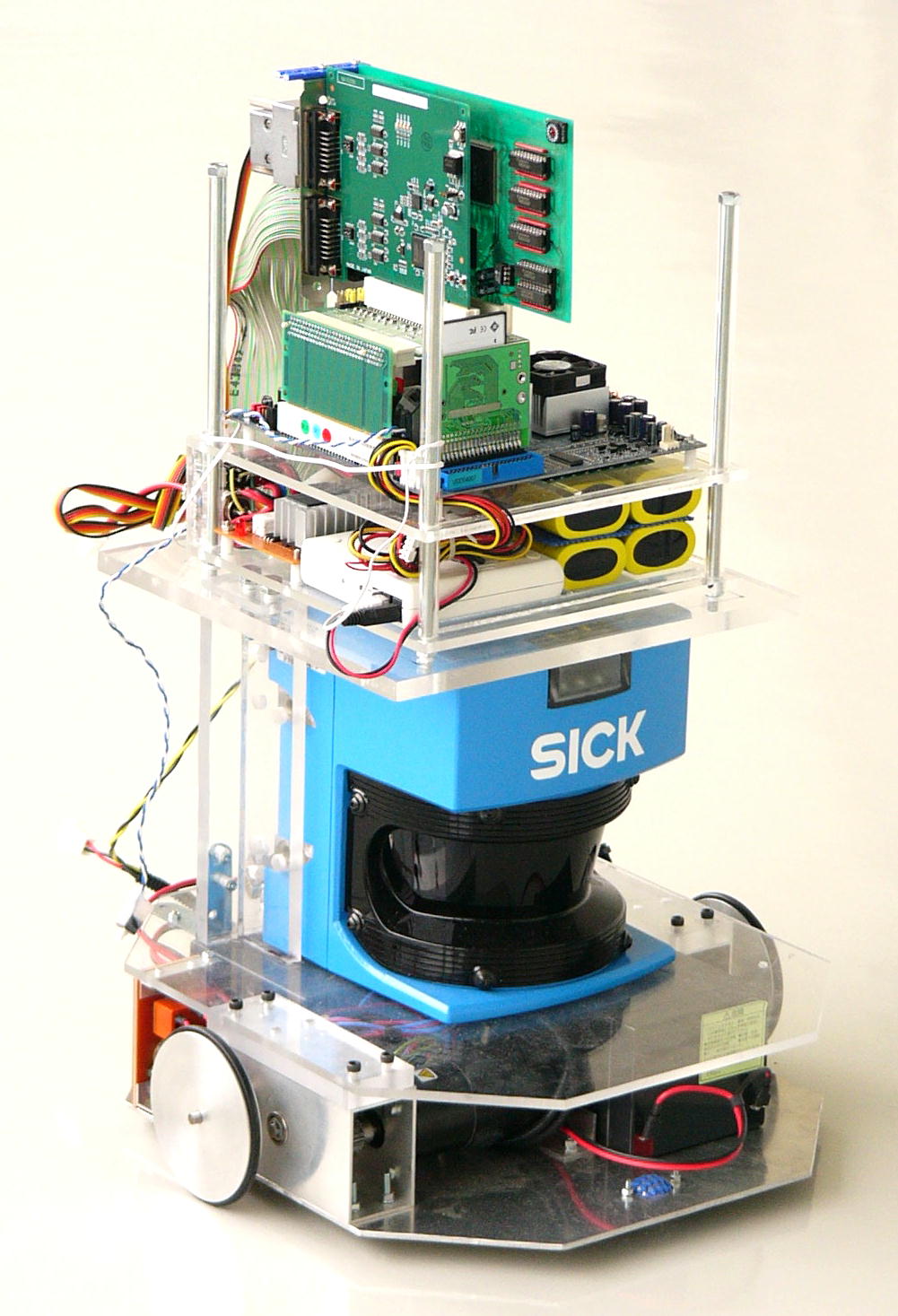 |
車輪移動ロボット2号機LRF版: 上記ロボットの改造版。SICK社製のレーザーレンジファインダ(レーザー距離計)を搭載したモデル。それに伴い、コンピュータにはRS-422 IFを搭載し、フルスピード 500kbpsで通信。最大で、181点/180度範囲 75Hzのスキャンを可能とした。以外のスペックは同上。 これを用いて、ナビゲーション研究と、ナビゲーション用位置特定研究のデータ採取を行った。 建物内総延長100メートルのマッピングと、70メートル先の実験室までの自動走行を達成。 ただ、知能が高いわけではないので、動きはいまひとつ。 (2005年度, 菅原) |
| Comming soon? |
トラック好きの学生さんの提案(JS-2005)によるトレーラーロボットの開発が進行中。 うまくできれば、実験室前の廊下で車庫入れとか。 複数ロボットの協調制御実験機も開発中(無線通信)。 |
倒立振子系
 |
パイプ乗りロボット: 「玉乗りロボットを作りたい」との学生さんの希望で始まったプロジェクト。 玉乗りは3方向の回転(前後左右転倒+スピン)がかかわり、まずはパイプ乗りを目指したら、と説得してダウングレードして、完成に至った機体。 基本的には車輪駆動型倒立振子で、パイプ乗りアタッチメントを付けなければ、普通の倒立振子として機能する。 駆動系:ステッピングモータ×2(直結)、NiCd7.2V×3+ブースター 制御系:H8/3052、ADXL加速度計、ADXRS角速度計 (2004年度, 伊東) |
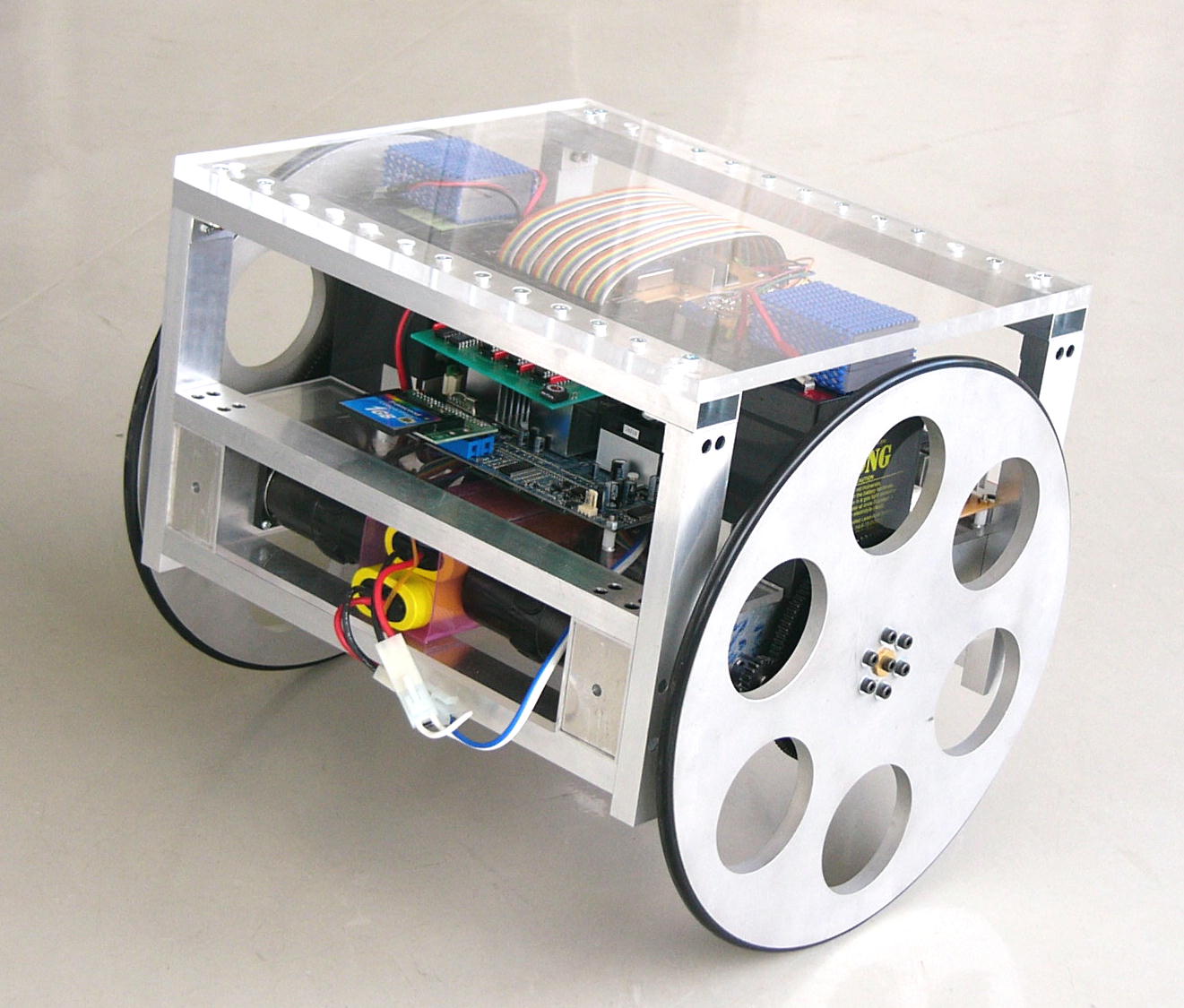 |
荷物搬送ロボット(通称、つちやロボ): 思うところあって、車輪移動ロボットとパイプ乗りロボットの合体版を開発。天板にものを乗せてバランス制御を行い、それをおすことでものを運ぶことができる、というコンセプト。車輪が大きいため、普通の手押し台車が引っかかるような段差も楽々越えられる。 制御系は車輪移動ロボット2号機とほぼ同一(実際、OSのCFを丸コピーしたところから開発開始)、センサ系はパイプ乗りに類似。 駆動系は40W DCサーボモータを4個搭載し、2個対で拮抗駆動を行ってギアのバックラッシュを低減。車輪径が300mmと大きいため、減速比は1:30。 許容過重20kgfで設計したものの、安全率が高いため、水満タンの18リットルポリタン(22kgf)は楽勝、60kgfの人間まで乗れてしまう(わりと楽しい)。 難点は、現状では、乗せるものに併せてパラメータを設定しなければならないことと、外部からの指示無しには旋回できないこと。実用のためには、瞬時にパラメータを自分であわせ、さらに旋回のためのユーザインタフェースを作る必要がある。 (2005年度, 土屋) |
| Comming later? |
そろそろ機構的アイデアも浮かんだので玉乗りロボットに走りたいところ。 荷物搬送ロボットも完成させたいところ。 |
{kind=link}
歩行系
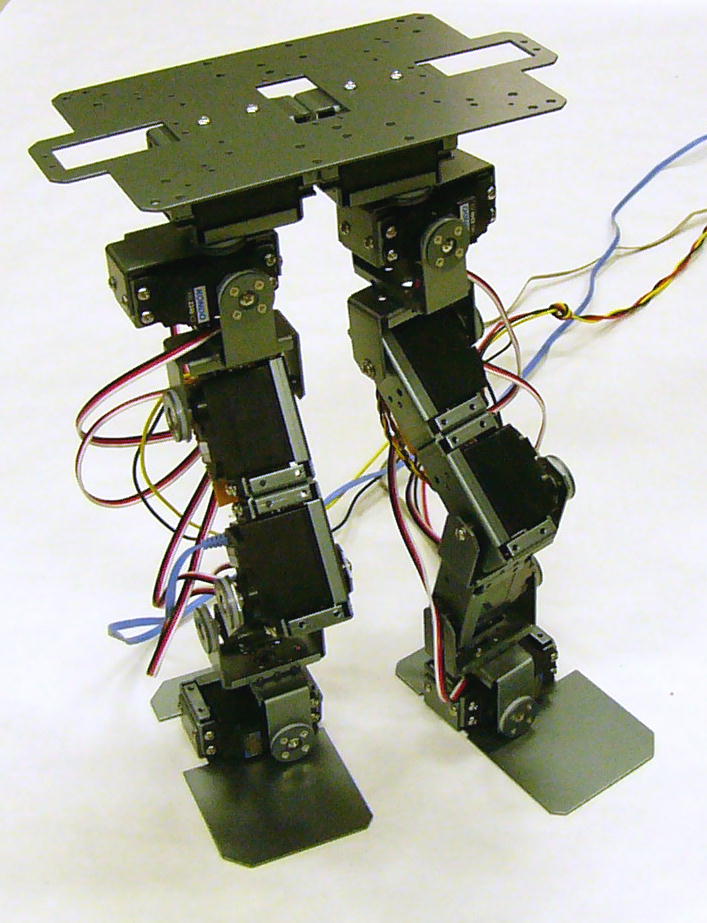 |
2脚歩行ロボット1号機(通称 あさも): 研究室立ち上げに際して、歩行ロボットをやるつもりはまったくなかったものの、学生さんには相当の需要があるらしい、と第一線の研究とは張り合わないことを前提に?始めた2脚歩行ロボット。 (注:熊谷は一応2脚歩行ロボットの専門家だったが) 諸々考慮の上、本体は、当時市販され始めていたロボット用ラジコンサーボと2脚ロボット組み立てフレームセット、サーボ制御回路はUniversalIF上で実装、制御はパターンプリプログラム→逆運動学計算による歩行とした。 半分ホビー系、半分本気系。 間違って後ろ歩きすることもあったけど、前進やカニ歩きを達成。 (2003年度, 淺田) その後、練習機として活用され続け、マイナーチェンジを行い、斜度15度の上り下りという、世にも珍しい?斜面歩行を達成した(論文やテレビでみるロボット、段差歩行とかはあるけど、案外斜面の例が見あたらない)。 そもそも、配属プレゼン時に「斜面をやります」「何度くらい?」「15度(きっぱり)」と質疑応答で過激な?公約をしたことから始まったテーマ。 (2005年度, 森) |
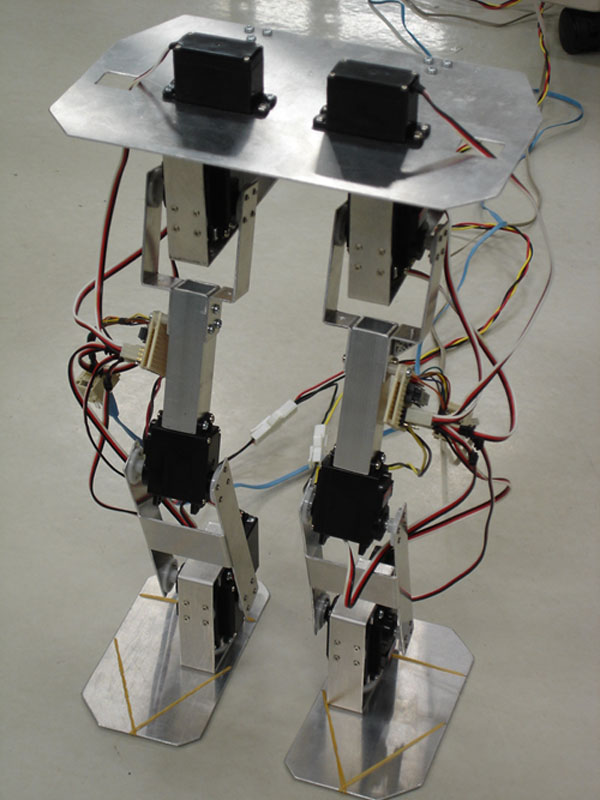 |
2脚歩行ロボット2号機(通称 いろいろ): 1号機の抱える、構造的問題を解消すべく、駆動系はラジコンサーボのまま、フレームをゼロから設計して自作した機体。 特徴は、ラジコンサーボを使いながら、股関節の3軸直交、足首の2軸直交を実現したこと。これにより、もも、すねが長くなって可動範囲が広くなると同時に、逆運動学計算をはしょりやすくなった。また、なんとなくスマートに見える。 (2004年度〜, 玉田) |
| Comming soon? |
2脚2号機作者による高性能版、開発中。 ロボットをプリプログラムではなく、操縦できるようにするための改良。 4脚ロボットも開発中?。 |
画像処理系
 |
広範囲高分解能全周画像: ものがないときは画像処理、の発想で、1年目の画像処理研究。 ロボットビジョンの研究において、静的な研究であれば、適当に画像を持ってきて処理すればいいものの、たとえば、おおざっぱに対象を見つけた上でズームして詳細を確認、といった研究をしたい場合はシステムを現地に持って行かなければならない。しかし、天候の問題や、道路の真ん中にそうそう行くわけに行かない。 一方、いくらCG技術が進んでも、CGでつくった環境は画像処理の研究には使えない。というのも、細かさの問題もさることながら、その環境を恣意的に作れてしまうから。 で、その元データを高分解能につくったうえで、指定したカメラアングルで切り出すことを考えた手法。 ビデオカメラを一定速度でぐるぐる回してとった映像をコマ毎にばらして、並べて貼り付ける。 自動でできればなお良かったけど、現状では手動。一般的なパノラマ写真作成ソフトと違うところは、横一列だけではなく上下方向も、またもと画像の枚数が非常に多いこと。左図でたしか70枚。 (2003年度, 野上) |
| No Image |
位相限定相関法による掌紋照合: もとは、顔認識がしたいと希望した学生さんを説得して、レベルダウンして、掌紋照合(顔はパーツの認識や特定など認識要因が多すぎるのに対して、指紋、掌紋は画像マッチングである程度なんとかなる)。 当時、原理だけは知っていた、位相限定相関法を試しに採用。 手にインクを塗って、紙に押して、スキャナで読んで、という古典的な手法で掌紋を採取し、照合実験を行ったところ、本人と他人の区別が明らかに存在することを確認。ただし、本人特定などの処理までは時間切れで組み込めず。 (2004年度, 伊藤) |
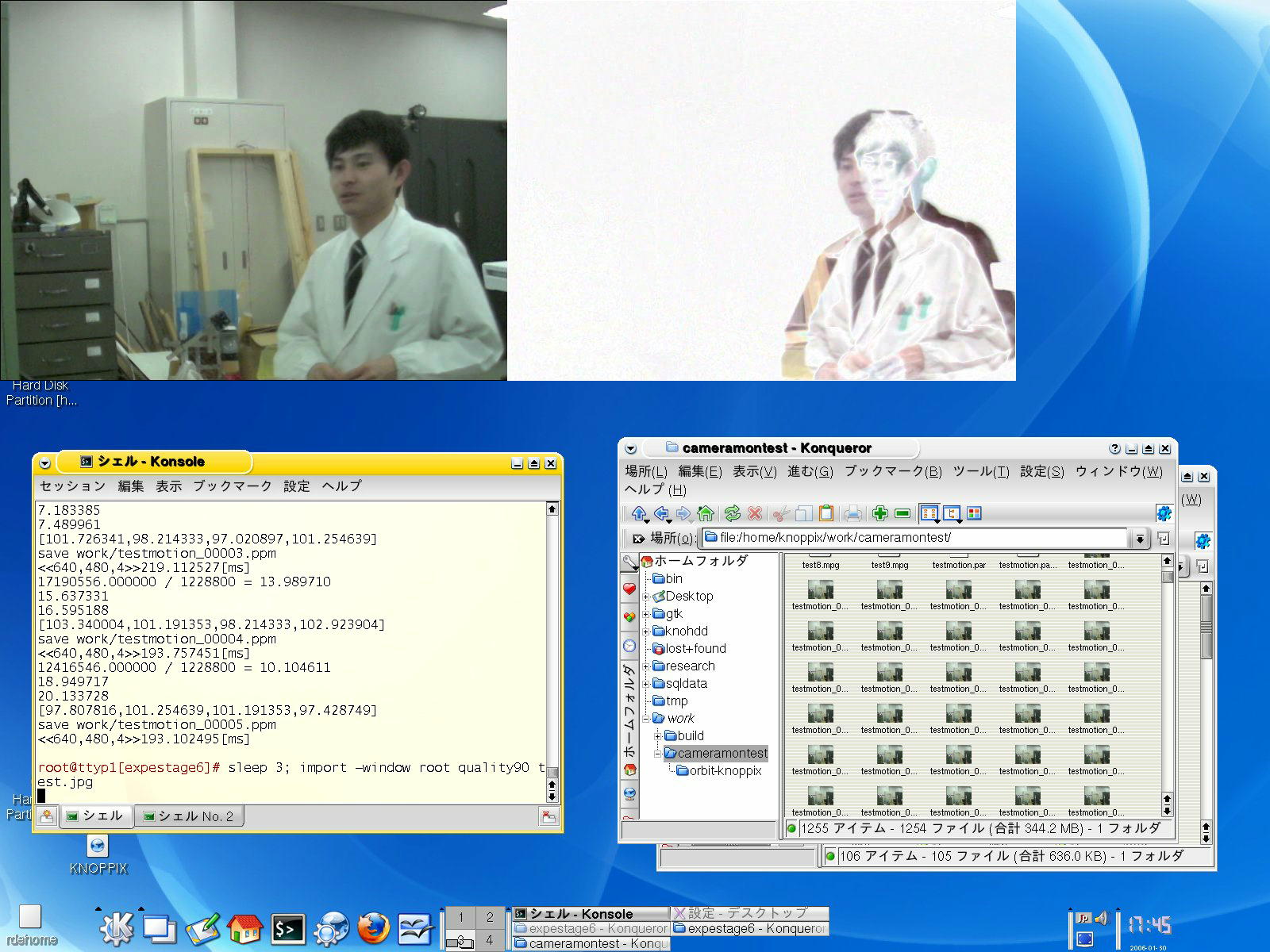 |
ネットワークカメラによる防犯監視システム: 防犯系の研究をしたいという学生さんの希望を元に、そのうち熊谷自身が暇を見て開発しようと思っていた監視カメラシステムの開発を実際にやってみてもらうことに。 ネットカメラから採取した画像をコマ間で比較して、動きがあれば、その前後の画像を保存、動きがなければ一定間隔毎に保存。画像には時刻をスーパーインポーズ。この画像を連結して映像化することで、動きがあるときはその映像が、ないときは超高速早送りとなり、あとでの検証が容易な映像を生成した。 開発者と被験者(ほかの学生さん)の「みつけられるか?」勝負により、性能が向上。 そのうち、ちゃんと改良して、熊谷家に本気で装備予定。 (2005年度, 小塚) |
| Comming Soon? | 画像マーカによるロボット位置特定手法の研究。 |
センシング系
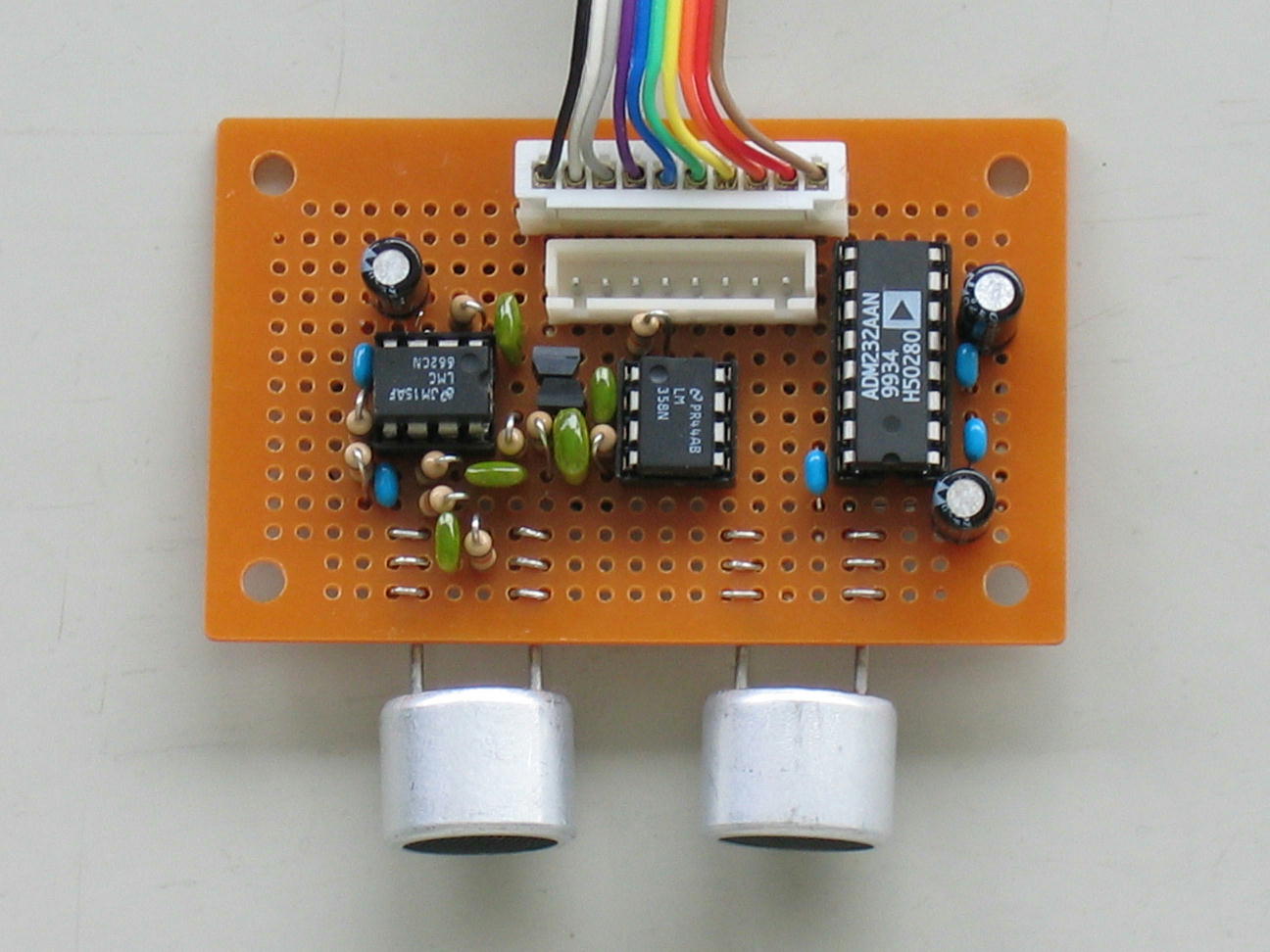 |
超音波障害物センサモジュール:
ロボットに付ける外界センサの代表である超音波センサを、マイコンとセットでインテリジェントモジュールとするための基礎開発。 全周をカバーするのに必要な個数を検討するための指向性測定と、実際のマイコンとセットのシステムの開発を行った。 マイコン側は、ほぼソフトウエア負荷無しで自動計測が可能な実装を行ったことで、本来はモジュールとして使う予定ではあるが、マイコン制御型のロボットにも搭載しうる構成となっている。最大で8チャネル。 5V単電源動作のため、超音波送信機はRS-232Cレベルコンバータによる増幅、受信回路も単電源動作を可能とする回路構成としている。 (2004年度, 小形) |
 |
レーザレンジファインダによるマップマッチング: ロボットをある程度の距離走らせようとすると、あっという間に滑りなどによる誤差が蓄積し、現在位置が分からなくなる。 そのためには、自分の位置を地図と照合して、決定することが必要となる、というのが背景の研究。 この分野は非常に先行研究も多く、あえて新しいのを生み出すよりは、まず動くものを実装することが先決、ということで、筑波大学で発表していた手法の実装を試みる。案の定?論文には書かれない部分があるようで、それらはその場で工夫して実装。 その過程で実験室周りの比較的精巧な地図を作ることにも成功。 が、まだ、ナビゲーションには直接応用されていない。 (2005年度, 森) |
| Comming soon? | いまのところ、予定無し |
その他イベント系
 |
「真の」動く七夕飾り: 1年目からのオープンキャンパスの出し物。 下端移動型倒立振子、本来はほうきを立てたりするけど、夏のオープンキャンパスはやっぱり七夕でしょう、くらいのノリで開発。ベースとなる機体は、仙台電波高専熊谷研(熊谷父)のもとで開発されて、使われなくなっていた機械。それにマイコンをつないで制御。 2006年夏、それまで「生」の竹を使っていたが、思い切って造花の竹を購入(研究費でではありません、念のため補足)。生の竹は虫が大量についてたり、すぐに枯れて葉っぱがちったり...でも、年1回のネタものために買うのもどうかと思うので、10月も使おうかと。 ちなみに、「単位を下さい」「熊谷研に入りたい」という願いが叶ったかどうかは不明。 (2003〜, 熊谷) |
 |
レーザー電子オルガン:
レーザーレンジファインダの使い方の実験も兼ねて、オープンキャンパス用に開発。 6オクターブ、音色20、同時発声(たぶん)16和音、全長約7mという超巨大鍵盤楽器。 レーザレンジファインダで鍵盤をタッチした手を検出して、それに対応する音を電子合成。 それなりの応答性が必要なため、361点/180度、37Hzの計測を行っている(ロボットの衝突判定より本気)。 当初の開発は床面で、と考えていたもののとても使えない(難しすぎ)ため、壁になったという経緯有り。 スペック上は、グランドで全長100mの鍵盤が作れるはず。 たぶん、レンジファインダをこういうおバカな使い方しているのは、うちくらいではないかと思われ....。 (2005〜, 熊谷) |
| Comming soon? | ネタものだけに、いつ次がでることやら |