アーム

 |
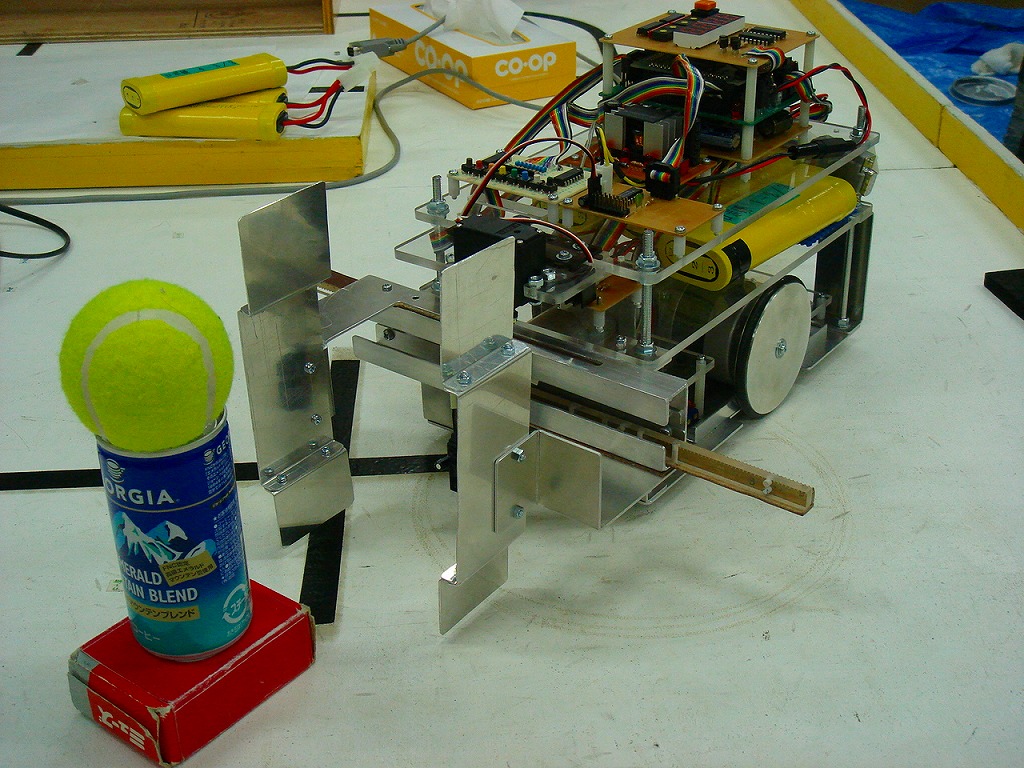
WAKABA3000のアーム。
このアームはサーボモータ2つで制御されている。
タワー(上からボール・空き缶・石けん箱)を捕る際は、対象まで距離センサーを使い一定の距離を取った上でアームの角度を調整することで、上から順に一つずつ回収していく。
捕手した対象は、ボールならアーム後方の穴に落として格納し、それ以外の空き缶・石けん箱は更に後方にあるゆりかごに乗せた後、それぞれ左右の筒に格納される。
|
アームのハンド

 |
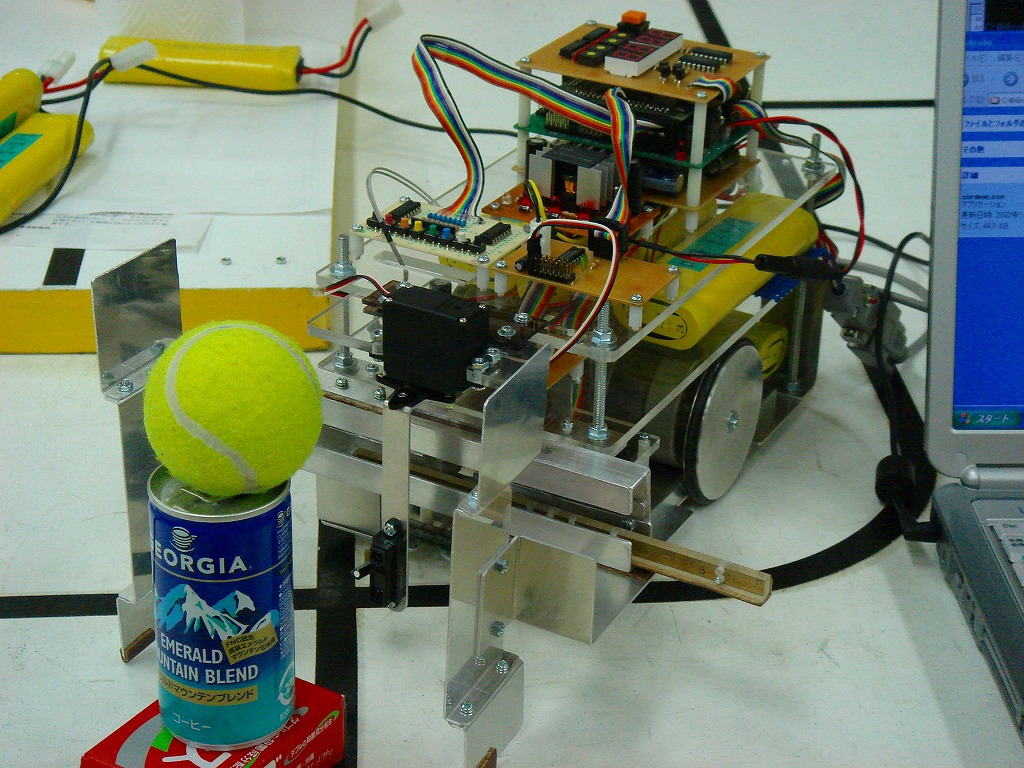
アームのハンド
このハンドにより対象を掴むことができる。ハンドは二つのサーボによって制御されている。捕手する部分にスポンジとゴムの滑り止めを張ることで対象をしっかりと捕手する。
取る際は、上から順に一つずつ掴んで格納していく。
|
ハンドのスイッチ

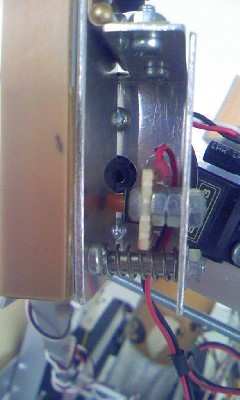 |
ハンドのスイッチ
ハンドにはスイッチが付いていて、これが対象を捕手した際にオンになることで掴んでいるかを判別している。
ちょうつがいとスプリングを使うことにより、掴んでいないときには自動でスイッチがオフになるように工夫してある
|
カウンターウェイト
 |
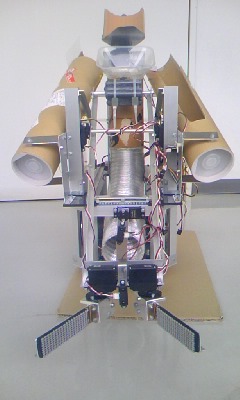
アームのカウンターウェイト。
アームの先にハンドがついている為、サーボだけではトルクが足りず、アームを動かすことができないため、軸を挟んで反対側に錘(おもり)を付けて補助を行っている。
|
センサー
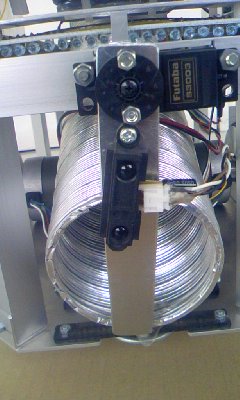  |
WAKABA3000のセンサー。
アームの先と、本体のボール格納部の出口の二カ所に距離センサーが取り付けてある。
アームをおろした状態から本体ごと回転することで、センシングを行い対象の方向と距離を測定する。
アーム側のセンサは対象に近く、またボール格納部のセンサーの高さはタワーの一番上に合わせてある。これにより、対象の距離や対象がタワーであるかどうかを判別する。
|
フラッシャー
 |
WAKABA3000のフラッシャー。
装飾。
実質的機能は皆無に等しいが、これを装備し点灯させる事による精神的効果は絶大。
熱血・魂・士気・信念・鉄壁・不屈・ひためき・必中・加速・覚醒・愛・狙撃・努力・幸運……まぁ、そんな感じ。
|