概要と到達目標
今回はメカトロニクスという概念・技術の紹介と、科目の導入について扱います。
到達目標:
- メカトロニクス(およびロボット)という概念を説明できる。
- メカトロニクスの構成ループを示し、全体の流れを説明できる。
- これから学ぶべきことを自覚できる。
資料アーカイブ 20180409版
- WEB版
- PDF版(1スライド/1ページ) (2020/05/10, 810,396 bytes)
PDF版(8スライド/1ページ) (2020/05/10, 602,322 bytes)
メカトロニクスとは
 |
今日の機械では、多くのものがコンピュータ制御されています。従来は電子制御などのなかった自動車や家電などもいまではコンピュータ制御が当たり前になり、「機械を扱う」=「コンピュータ制御の機械を扱う」となりました。 軽く触れるだけでピッピッピという音と共に動作するような機械はほとんどコンピュータ制御(一部にコンピュータ抜きの電子回路制御)であり、身の回りを見渡してみるとそれに該当しない機械が少ないことが分かると思います。
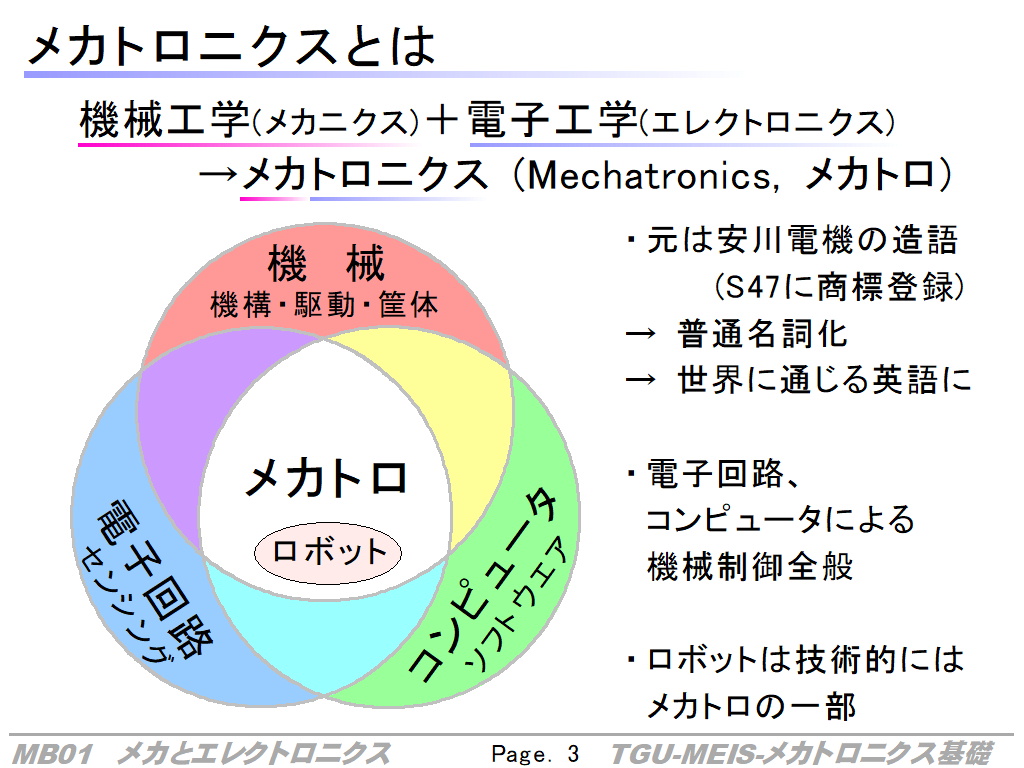
そもそも、この「メカトロニクス」という言葉が「メカ(ニクス、ニズム)」+「エレクトロニクス」の和製造語です。
安川電機(いまもこの業界でメジャーな企業)が自社製品用に用意した言葉(登録商標)でしたが、性質を表すのに非常に便利であったため一般化、今では普通名詞として使われています。英語でもMechatronicsで通じます。
当時もコンピュータは存在しましたが、いまのように機器に組み込むほどは一般的・小型ではなかったため、当初は電子回路による制御が主でした(そのため、コンピュータのコの字もない?)。いまでは、電子回路のみで構成するよりもコンピュータ(小型:マイコン)を使った方がより高機能になり、作りやすくなったためコンピュータ制御とすることが一般です。
このミシンのメカトロ化は、まず、モータの制御から始まりました。
第二段階では、一部の動作が機械的に分離されました。
第三段階では、全ての動作ごとにモータが付くようになり、すべての動作をソフトで連動させます。
数年前にミシンメーカ数社に問い合わせたところ、家庭用ミシンは第二段階で、工場でカーテンやシーツを縫うミシンは第三段階に入っているとのことでした。ただし、家庭用を第三段階に持っていくのは難しいと。
このように、メカトロ化することで調整がしやすくなり、作りやすくなるという点が、メカトロ化の重大なポイントです。一方で、なんでもメカトロ化するわけではなく、メカのまま残し、それに制御を加えていくということもあります。
この科目(基礎+総合)は、以上のようなメカトロニクスのシステムを感覚的に理解できるようになるための、「教養としてのメカトロニクス」を目的とします。
メカトロニクス基礎では、主には二つの目的があります。
一つは、電気、電子回路に対する基礎的な知識を身につけることで、そのあとの講義の基礎もつくります。
もう一つは、メカトロのループ内の要素の具体的事例や手法を知ることで、それぞれの部分の概要を知ります。
別の視点で見ると、近年は従来型の機械からのメカトロ化が、大きなトレンドです。従来はモータが回るだけ(動作はオンオフのみ)で動く機械だったものが、様々な形でコンピュータ制御化しています。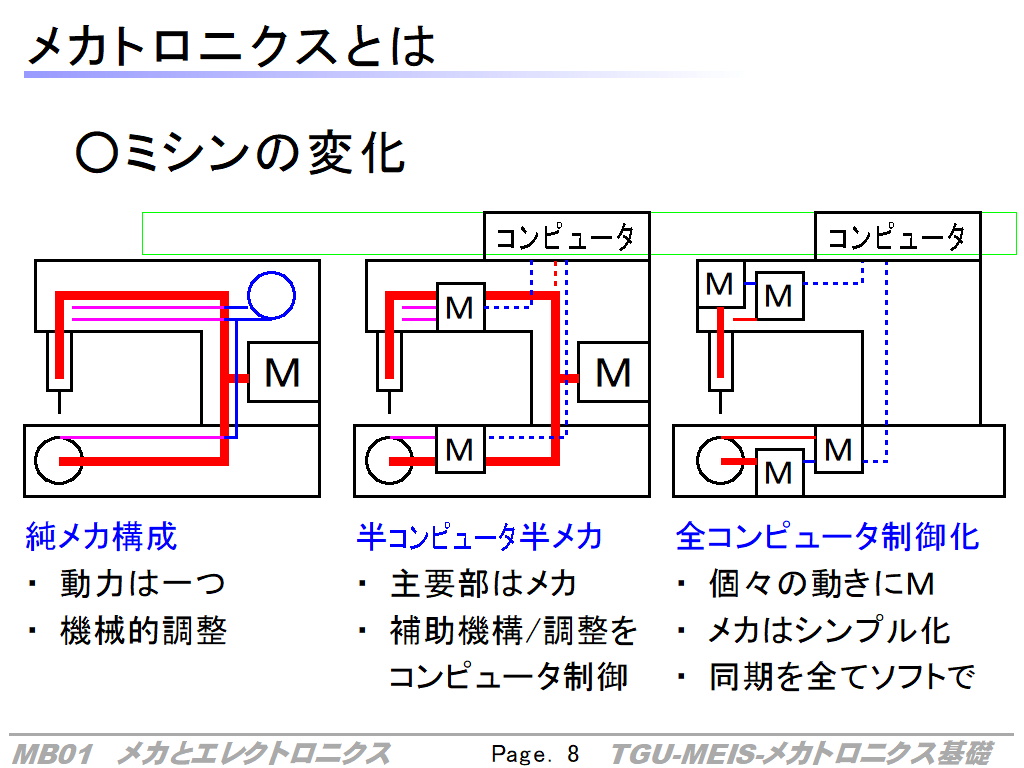
たとえば、その変化が分かりやすいものにミシンがあります。
ミシンは布を縫う機械で、主な動作は、針を上下させること、針が下がったところで下側で下糸を引っかけること、針が上がっている間に布を送ること、です。
それに加えて、送り量を調整することで縫うピッチや前後進行を調整、針を左右に振ることでジグザグ縫いを実現、両者を連動させることで簡単な模様縫いができました。
古くからあるミシンは、これをすべて機構で実現していました。一つの回転動力、古くは足踏み/そのあとはモータ、から、カムやリンクを介して適切な幅の往復運動、間欠動作にしています。模様縫いも2段のカムで二つの動作を連動して調整していました。
縫うときの速度は回転動力の速度で決まります。
単にモータへの電気的な出力だけの大小だけを調整して速度を調整しようとすると、薄い布と厚い布を縫うときで速度がかわります。そこで、同じ操作に対して、厚さによらずに同じ速度で縫えるような、速度のフィードバック制御がなされたようです。
この時点では、ミシンとしての機能は依然としてメカで全て実現されています。
分離したところには、動作させるために個別のモータを取り付けます。そのうえで、縫う動作と連動して、針を横に振るなどを、コンピュータのソフトウエア経由で行うようにします。
これによって、送りやジグザグの幅が数値的に調整しやすくなりますし、全てをリンク等でつないでいたことにくらべると、メカ的にシンプルになります。ただし、針の上下と下糸をかける機構は依然としてメカでつながっています。
もう、上と下をつなぐメカはなくなりました。これによって、全体的なメカの統合設計は容易になり、動作の調整などはすべてコンピュータ側にきます。
その理由は、工場では、加速→定速→減速、という運転パターンが予め分かっているため、上下の同期制御がしやすいこと、大物を縫うには大きなミシンが必要で、そのためには分離されている方が作りやすいことがある一方で、家庭のミシンはどのような運転パターンをされるかが未知(急な加減速など)で同期させるのが難しいから、とのことでした。
メカトロニクスの構成
メカをコンピュータ制御にするのに、ただ、メカとコンピュータを貼り付ければ良いわけでは無く、情報をつなぐ必要があります。
その構成のために、いくつかの主要要素があります。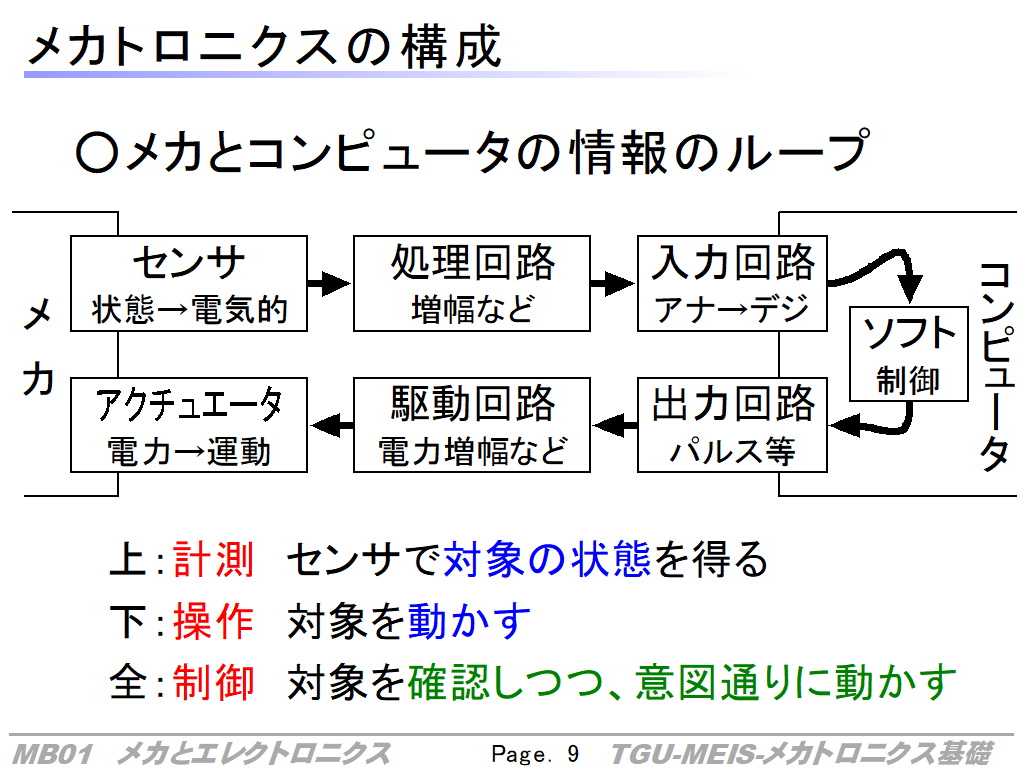
これらによって、メカとコンピュータで情報のループを作ることが、メカトロニクスの基本です。
全要素をそろえることで、フィードバック制御ができるメカ(含むロボット)を構成でき、上半分だと機械の状態の計測ができます。
下半分のみの例は少し高級な扇風機(風力が時間と共に変わるような)などです(エアコンは温度センサによるフィードバック制御がすくなくともある)。
この科目の目的と趣旨
メカの部分については、様々な機械の専門科目があり、ソフトウエア(プログラミング)も科目があります。
そこで、その中間を取り持つ部分を扱います。
メカトロニクスそのものは、機械、電子工学、コンピュータ&ソフトウエアにまたがる総合技術であるため、エンジニアとしても全てを身につけることは困難ですし、ましてや30回の講義では不可能です。
ただ、全体として構成と「こういう要素がある」ということを、一度は頭に通すことで、今後それぞれの分野に関わることになったときに足がかりとなるように、また、これからの機械を扱う上で最低限のセンスを得られるように、と考えています。
メカトロニクス総合では、これをより具体化するため、より具体的な回路の例や簡単な設計方法や検討に必要な基本式、メカトロシステムを取り扱う上で知っておくべきことと、そのために必要な基礎知識、を提供します。
つまり、基礎では見た目分かりやすいところでこのループを一周、総合ではもう一段踏み込んだ上でもう一周します。
その上で、さらに専門知識を得たいという場合は
講義情報の関連情報をあたるといいでしょう。
関連情報