活用事例
最終更新: 2011/02/10 20:09:48
[| ]
最終更新: 2011/02/10 20:09:48
はじめに
本ページでは活用事例を紹介します。
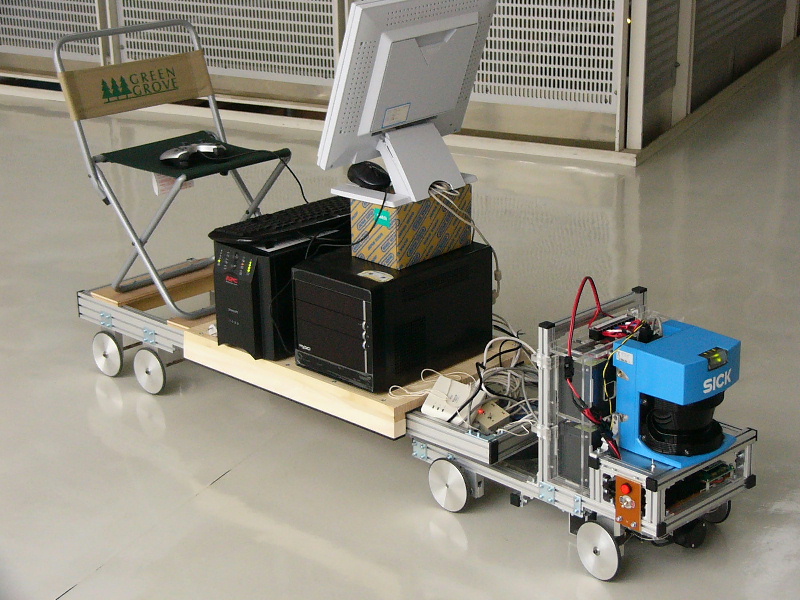
研究用トレーラロボット
 |
| トレーラロボット |
 |
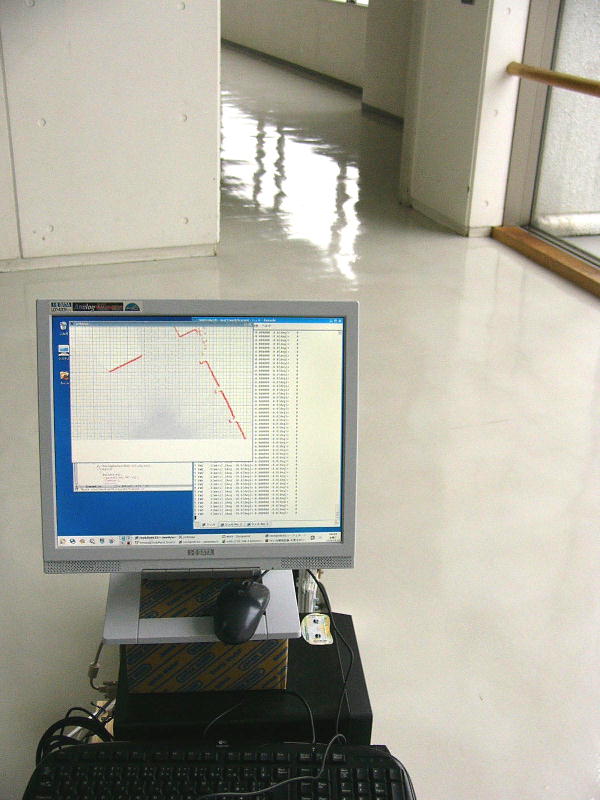
| LMS200による環境スキャン |
このトレーラロボットは、牽引車(トラクタ)に動力と、モータ等を制御するローカルコントローラとしてH8/3052が搭載されています。
一方、その上位となって制御するPCは被牽引側(トレーラ)に積んでいます。
PCはLinux 2.6(CentOS 5.1)をOSとし、USBシリアル変換回路を介して、接続しています(115,200bps)。
ヘッド上にはSICK LMS200を搭載しています。これもまたUSB変換器を通して、RS422, 500kbps で通信しています。
なお、電源はトレーラ走行用の鉛蓄電池×4≒50Vを、DC-DCコンバータで24Vにして供給しています。
これらは、オンラインでの連結解除は想定せず、通信ケーブルが直接つながっています。
熊谷正朗
[→連絡]
東北学院大学
工学部
機械知能工学科
RDE
[| ]