研究速報
熊谷研究室(熊谷・玉田)は2脚歩行ロボットによるスムーズなローラーウォークを実現しました。
平成18年12月18日、計測自動制御学会東北支部研究集会で公表した内容の概要を速報します。
研究集会資料(予稿) (2006/12/20, 919,333 bytes)
2脚歩行ロボットによるローラーウォーク
ローラーウォークとは、東工大 広瀬研において、4脚歩行ロボットTITAN VIIIの脚先に受動車輪を取り付け、脚による運動で車輪移動を可能にした移動方式です。
これと類似の動作を2脚歩行ロボットで実現しました。
本研究の特徴は、脚先に「旋回曲率を操作可能な台車」を取り付け、これによって脚を無理なく任意の曲線に追従できるようにしたことです。 安定した両脚支持での連続動作を可能にし、また、曲線の設定によっては直線のみならず曲線もスムーズに曲がることができます。
※映像編集時に音を消し忘れたので、音量に注意してください※
直線移動、MPEG-1 (2006/12/18, 895,230 bytes)
直線移動、MPEG-2(高画質) (2006/12/18, 3,598,340 bytes)
直線移動、低い目線で、MPEG-1 (2006/12/18, 803,050 bytes)
直線移動、低い目線で、MPEG-2(高画質) (2006/12/18, 3,162,116 bytes)
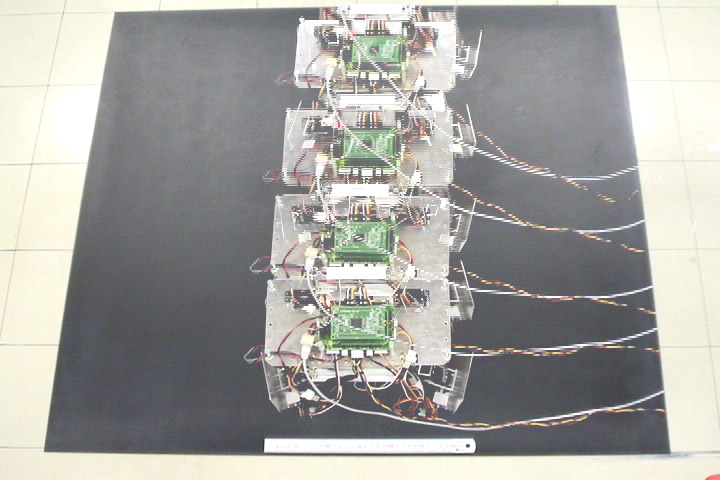
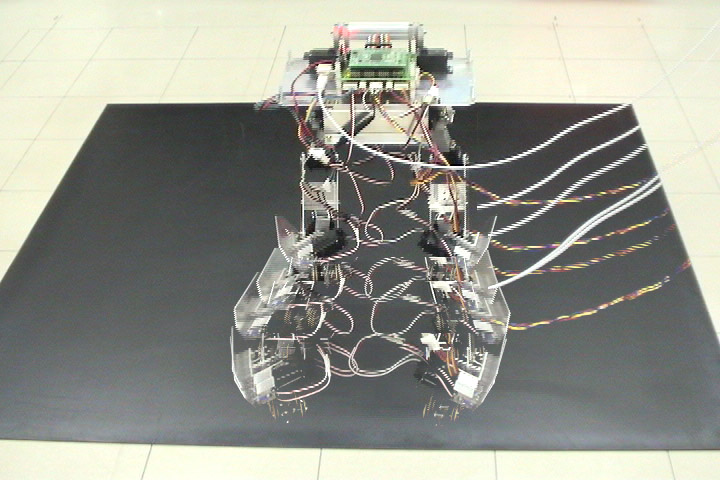
脚の開閉で直進運動を行います。その際、足首ロール軸の操作によって台車の傾きを操作し、曲率を変化させて意図した曲線上を走るように調整します。
左旋回移動、MPEG-1 (2006/12/18, 1,044,784 bytes)
左旋回移動、MPEG-2(高画質) (2006/12/18, 4,190,212 bytes)
左旋回移動、MPEG-1 (2006/12/18, 942,360 bytes)
左旋回移動、MPEG-2(高画質) (2006/12/18, 3,719,172 bytes)
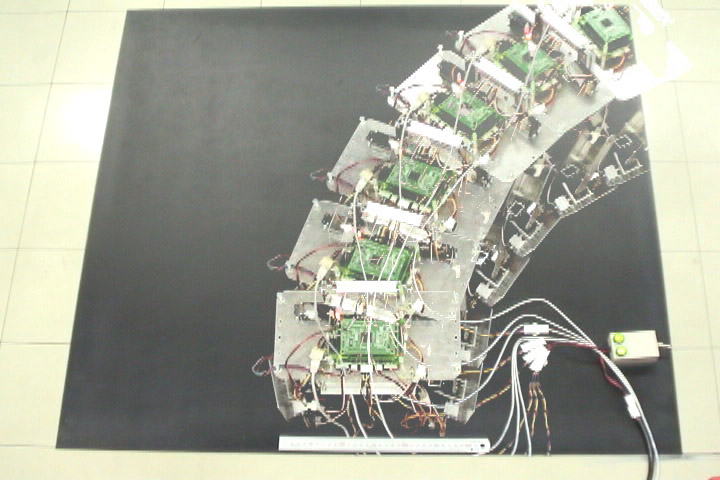
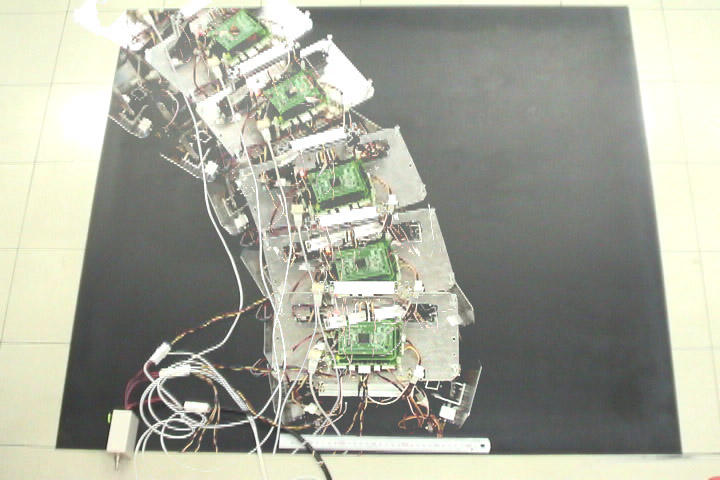
予め、脚の想定経路を円弧にそわせて算出し、それに沿うように足首の運動を生成すると円弧にそった旋回移動も可能です。
傾斜により旋回曲率を操作できる台車
上記、ローラーウォークを実現するためには、足先の向きを変える必要がありますが、先行研究では車輪を滑らせることが前提となり、動作の制約になっていると考えました。 その解消には車輪を滑らせることなく向きを変えていくための仕掛けが必要と考えました。
そのためには、旋回曲率を操作可能な台車(たとえば、乗用車のようなステアリング機構もその一種)が必要ですが、歩行ロボットの自由度を有効活用するために、全体を傾斜させるだけで自動的に曲率が変わるような機構を発案しました。
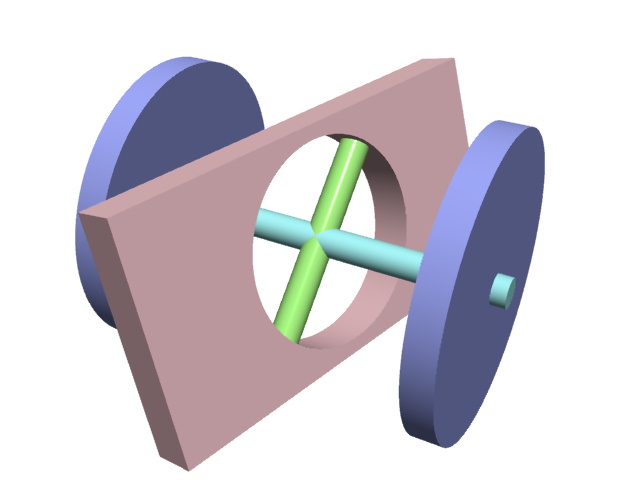
台車の車輪の取り付け部はこの図のようになっています。
図中、紫色の台車本体に対して、斜めに支持軸(緑)が自由に回転するように取り付けられています。
これと直角に水色の車軸が固定されています(支持軸と車軸は十字の部品)。車輪は左右独立に回転するように車軸に取り付けられています。
台車を傾けても、車輪で支えられているため車軸は水平を保とうとします。そのためには支持軸が回転する必要があります。
その回転に伴い、車軸の方向が、台車の左右方向に対して、角度変化します。
車軸部、上面図 (2006/12/18, 558,592 bytes)
車軸部、後ろから (2006/12/18, 475,648 bytes)
車軸部、俯瞰図 (2006/12/18, 569,856 bytes)
台車全体、俯瞰図 (2006/12/18, 697,856 bytes)
このような台車を足首に取り付け、足首のロール軸で傾けることで、台車の旋回を操作し、滑らかに曲線軌道に沿わせました。