概要
 梵天丸はロボットとしてみると、
梵天丸はロボットとしてみると、
- 移動方式:対向2輪型車輪ロボット
- センサ:赤外線による前方障害物検出
- コンピュータ:8bitワンチップマイコン
- 電源:単3電池4本(4〜6V程度)
以下では、移動とセンサの部分について、解説します。
走行部分
梵天丸はロボットとしては対向2輪型移動ロボットと分類されます。
キャスタも入れると車輪は3輪ありますが、ロボットとして動作を考えるときキャスタは「ささえるだけのもの」として考慮しません。そのため、2輪型ロボットといいます。「対向」とはその車輪が、ロボットを境に向き合った対称の位置にあることを指します。
対向2輪型ロボットは、移動するためには左右の車輪の回転(速度or角度)を制御(コントロール、調整)します。これによって、直線や円弧を描いて移動、もしくは、その場で旋回します。
対向2輪型ロボットについては、ロボット工学:車輪移動ロボットにその理論をまとめてあります。
このページは3年生の「ロボット基礎工学」のためのページですが、対向2輪についてはイメージさえつかめれば、1年生でも(というか、高校生でも)理解できる程度の基礎原理です。
押さえるべき点は
- 車輪の速度差だけで動きが変わる
- 円弧運動する場合の、その中心は、左右の両輪の回転軸の延長線上のどこか
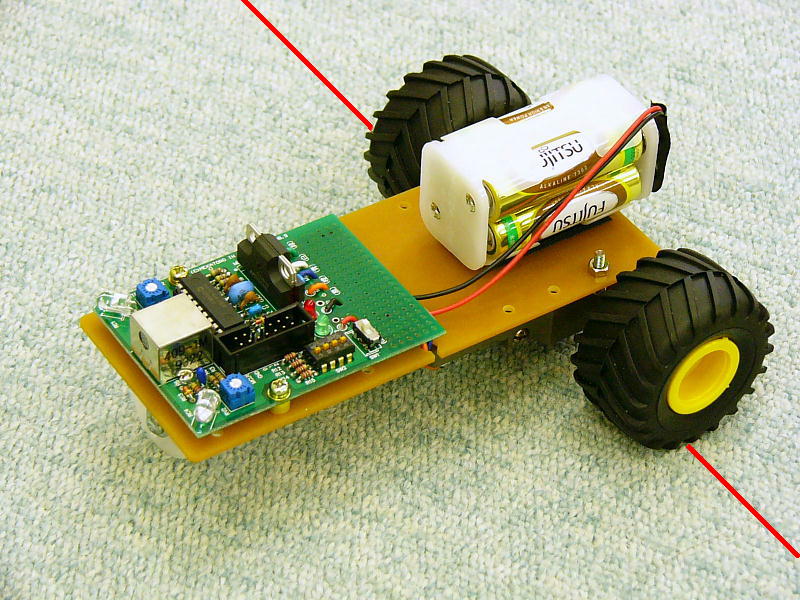
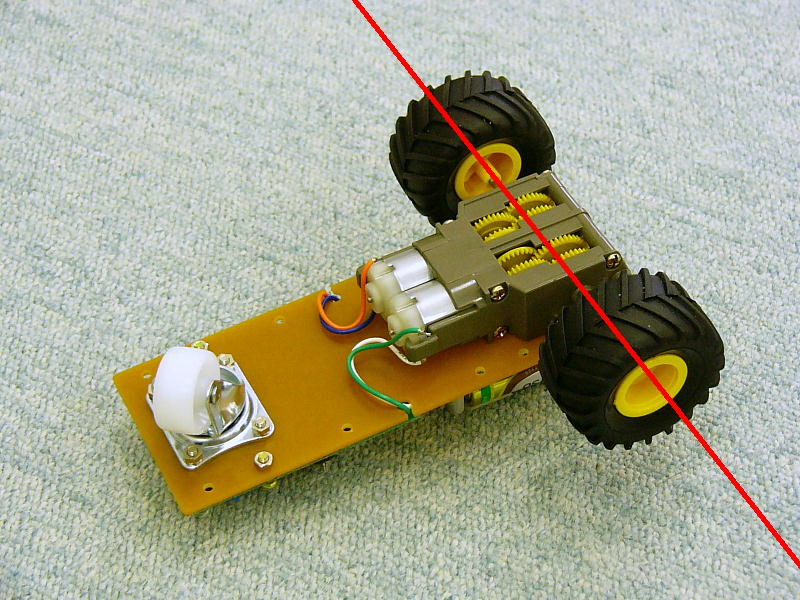
赤線上のどこかを中心に動きます。実際には車輪が接している点の延長、と考えてもいいでしょう。
さて、両輪を同じ速度で回せば前に直進、左の車輪の速度が右より高ければ右に曲がる、というイメージは湧くと思います。
梵天丸においては、Hブリッジと呼ばれる回路によってモータにかかる電圧の正負を、PWMという方式でモータにかかる電圧の平均値を変化させて速さを決めています。
速度の段階としては、+7〜+1、0、−1〜−7と15段階あると考えればよいでしょう。
なお、電圧はおおざっぱには、その大小が速さの大小と関連します。ただし、比例の関係にあるわけではないこと、また負荷(ロボットの重さ、摩擦など)によっては同じ電圧でもスピードが落ちることがあります。
(そのため、本式のロボットでは、まず車輪速度が指定値になるように制御され、ロボットを動かすときはその指定値を操作します)
梵天丸のこうどう命令とそれぞれのモータの制御の関係を表にまとめます。
| こうどう | 左モータ | 右モータ | 動作の概要 |
| とまれ | 0 | 0 | 停止 |
| ぜんしん L、R | +L | +R | 基本的に前方に移動 L>Rなら右方向に曲がる L<Rなら左方向に曲がる |
| こうしん L、R | −L | −R | 基本的に後方に移動 L>Rなら右方向に曲がる L<Rなら左方向に曲がる |
| みぎよれ L | +L | 0 | 右は停止=右車輪を軸に右前方に旋回 |
| ひだりよれ R | 0 | +R | 左は停止=左車輪を軸に左前方に旋回 |
| みぎまわれ L、R | +L | −R | 左車輪が前に、右車輪が後ろに回る=右に旋回 旋回中心は両輪の間のどこか、位置はLRの比で決まる |
| ひだりまわれ L、R | −L | +R | 左車輪が後ろに、右車輪が前に回る=左に旋回 旋回中心は両輪の間のどこか、位置はLRの比で決まる |
| みぎさがれ L | −L | 0 | 右は停止=右車輪を軸に右後方に旋回 |
| ひだりさがれ R | 0 | −R | 左は停止=左車輪を軸に左後方に旋回 |
具体的に「1〜7」がどの程度かは試してみましょう。
なお、梵天丸の移動速度は、「まきもの」だけではなく、梵天丸本体でも調整可能です。モータにつながる線のそばについている水色の部品(可変抵抗、ポテンショメータ)をまわすと、「まきもの」の設定値に重ねて、全体的に速度を可変できます。
この調整は、
- ギアの摩擦抵抗のアンバランスなどの関係で直進しない場合に、モータの速度を調整して直進するようにする。
- 電池の残量による速度変化を調整する(もちろん、電池が新しいうちに絞っておく)。
- 敢えて、最初から速度のアンバランスをつける。
梵天丸のセンサ
 梵天丸の頭部には障害物センサがついていて、おおざっぱに前方、右前方、左前方の障害物を判別することができます。
梵天丸の頭部には障害物センサがついていて、おおざっぱに前方、右前方、左前方の障害物を判別することができます。
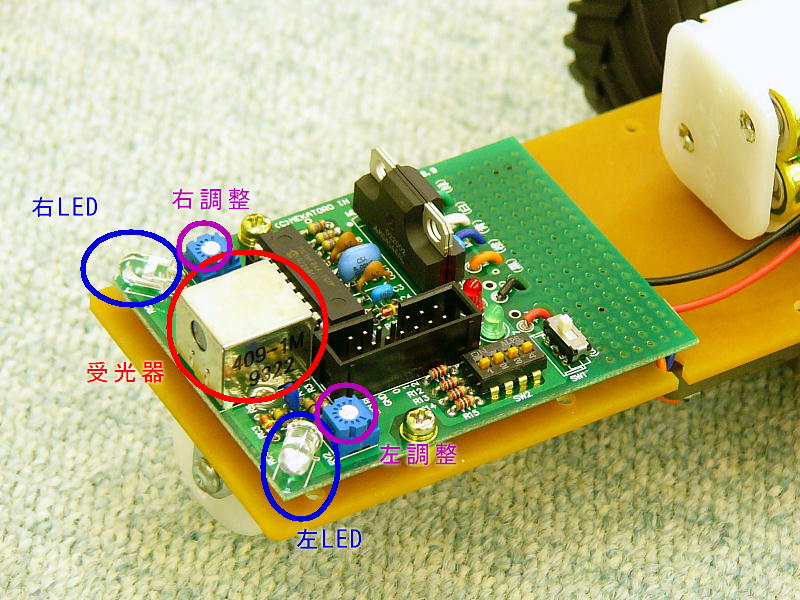
具体的には、2個の赤外線発光ダイオード(LED)(図中青丸)と1個の赤外線受光モジュール(赤丸)から構成されています。
(受光モジュールはテレビの赤外線リモコンなどにも使われるもの。実際には光らせるときには38kHz程度で明滅させています&そのくらいの光のみを受信するようにしています<太陽や蛍光灯などの影響を避けることが目的 また、基準値を設けて、受信の有無をはっきりさせています<「強い」「弱い」などの判定はなく、「あり」「なし」のみ)
まず、右のLEDを光らせます。このとき、「なにか」があって、赤外線が反射されると、受光モジュールがそれを検知します。同じく、左のLEDを光らせて反射があるかどうかを調べます。
たとえば、右のLEDを光らせたときに反応があったけど、左のLEDでは反応が無い場合、「なにか」は右の方にあると考えられます。逆の場合は左の方、両方で反応があった場合は前方にあると考えられます。
もちろん、右にも左にも前にもあるという場合もあるでしょうし、右と左で「前」を判定する可能性があります。というくらいアバウトですが、いろいろと使い道はあります。
これらが、まきものの「じょうけん」の「まえだ」「みぎだ」「ひだりだ」に相当します。
さて、以上のような原理で光障害物センサを構成していますが、判断条件は「あるレベル以上の反射があったか」です。そのため、図中紫の丸で示した調整抵抗、および「まきもの」の「かんど」は実際には受光の感度ではなく、発光する強さを調整しています。
(前者はもろに強度を、後者はパルスを調整して見かけ上出力を絞ります)
また、「反射光」であるため、以下のような点に注意が必要です。
- 対象の反射率に検出距離は依存する。おおざっぱに白いものはよく反射するので長距離まで測れ、黒いものは測れないことがある。
ちなみに、白、黒は人間の目で見える波長のことなので、赤外線だと違うことがある。 - よく反射しそうな鏡のようなものは、こっちから出した光が反射されてどこかにいってしまうため、逆に測れないことが多い<真正面ではかなり遠くまで測定できるが
- 床からも反射光があるため、それで誤動作することがある。
対策:感度(=光強度)を下げるか、LEDを斜め上に向けて床のほうにあまり光が行かないようにしてみる。